Tecnología asombrosa: micro-robots baten récord de tamaño, peso y velocidad

La Universidad de Washington State, en los Estados Unidos, presentó sus hallazgos científicos: dos robots parecidos a insectos afirmando que son los micro-robots completamente funcionales más pequeños, ligeros y rápidos jamás creados.

Te puede interesar
Estados Unidos ya castiga duro a Brasil con aranceles del 25 %
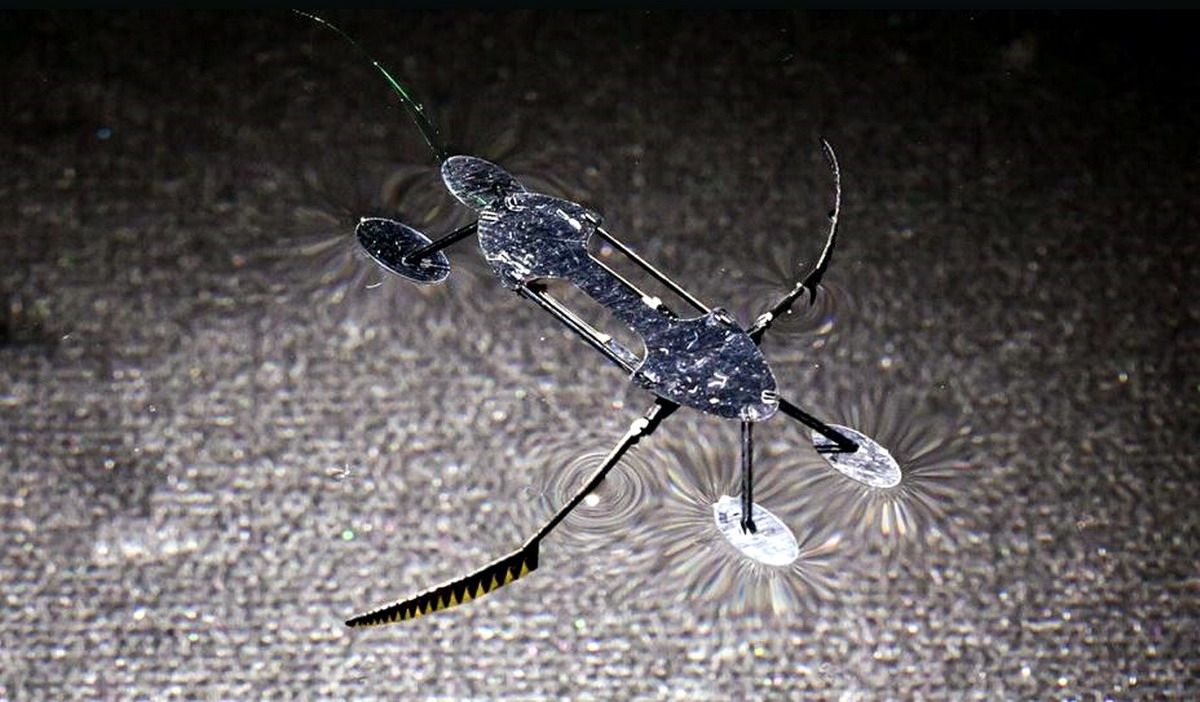
Los descubrimientos de estos robots en miniatura -un hemíptero y un zancudo- pueden utilizarse para trabajar en áreas como la polinización artificial, la búsqueda y el rescate, la vigilancia ambiental, la microfabricación o la cirugía asistida por robots. Al informar sobre su trabajo en la Conferencia Internacional sobre Robots y Sistemas Inteligentes de la Sociedad de Robótica y Automatización IEEE, el hemíptero pesa ocho miligramos, mientras que el zancudo de agua pesa 55 miligramos. Ambos pueden moverse a unos seis milímetros por segundo.
"Es rápido en comparación con otros microrobots a esta escala, aunque todavía está por detrás de sus parientes biológicos", dijo en un comunicado Conor Trygstad, estudiante de doctorado en la Escuela de Ingeniería Mecánica y de Materiales y autor principal del trabajo. Una hormiga suele pesar hasta cinco miligramos y puede moverse a casi un metro por segundo.

La clave de los pequeños robots son sus pequeños actuadores que hacen que los robots se muevan. Trygstad utilizó una nueva técnica de fabricación para miniaturizar el actuador hasta menos de un miligramo, el más pequeño jamás fabricado.
"Los actuadores son los más pequeños y rápidos jamás desarrollados para microrobótica", dijo Néstor O. Pérez-Arancibia, profesor asociado en Ingeniería en la Escuela de Ingeniería Mecánica y de Materiales de WSU, quien dirigió el proyecto.
El actuador utiliza un material llamado aleación con memoria de forma que puede cambiar de forma cuando se calienta. Se llama "memoria de forma" porque recuerda y luego vuelve a su forma original. A diferencia de un motor típico que movería un robot, estas aleaciones no tienen partes móviles ni componentes giratorios.
"Son muy sólidos mecánicamente", dijo Trygstad. "El desarrollo de un actuador muy ligero abre nuevos horizontes en la microrobótica".
Las aleaciones con memoria de forma generalmente no se utilizan para movimientos robóticos a gran escala porque son demasiado lentas. Sin embargo, en el caso de los robots WSU, los actuadores están hechos de dos pequeños alambres de aleación con memoria de forma que tienen 1/1000 de pulgada de diámetro. Con una pequeña cantidad de corriente, los cables se pueden calentar y enfriar fácilmente, lo que permite a los robots batir sus aletas o mover sus pies hasta 40 veces por segundo. En las pruebas preliminares, el actuador también pudo levantar más de 150 veces su propio peso.
En comparación con otras tecnologías utilizadas para hacer que los robots se muevan, la tecnología SMA también requiere sólo una cantidad muy pequeña de electricidad o calor para hacerlos moverse.
"El sistema SMA requiere sistemas mucho menos sofisticados para funcionar", afirmó Trygstad.
Trygstad, aficioando a la pesca con mosca, ha observado durante mucho tiempo a los zancudos y le gustaría estudiar más a fondo sus movimientos. Mientras que el robot zancudo acuático de WSU realiza un movimiento de aleteo plano para moverse, el insecto natural realiza un movimiento de remo más eficiente con sus patas, que es una de las razones por las que el ser real puede moverse mucho más rápido.
A los investigadores les gustaría copiar otro insecto y desarrollar un robot tipo zancudo que pueda moverse tanto por encima como justo debajo de la superficie del agua. También están trabajando para utilizar baterías diminutas o combustión catalítica para que sus robots sean completamente autónomos y no estén conectados a una fuente de alimentación.
Video: perros robots ya trabajan en New York
Dpa, Ieee-Ras, Wsu.org, Efe, Youtube.


